Abstract
Using a neural network for the brain, we want a vehicle to drive by itself avoiding obstacles. We accomplish this by choosing the appropriate inputs/outputs and by carefully training the neural net. We feed the network with distances of the closest obstacles around the vehicle to imitate what a human driver would see. The output is the acceleration and steering of the vehicle. We also need to train the network with a set of strategic input-output. The result is impressive, for a couple of neurons! The vehicle drives around avoiding obstacles, but some improvement or modification can be done to make this software work for a specific purpose.
Introduction
The idea is to have a vehicle that drives by itself and avoids obstacles in a virtual world. Every instant, the vehicle decides by itself how to modify its speed and direction according to its environment. In order to make it more real, the AI should only see what a person would see if it was driving, so the AI's decision is only based on obstacles that are in front of the vehicle. By having a realistic input, the AI could possibly be used in a real vehicle and work just as well.
Gaming is the first use I think of when I hear "AI controlling a vehicle". Many driving games could use this technique to control vehicles, but there are a number of other applications that could be found for software that controls a vehicle in a virtual world, or in the real world.
So how do we do this? There are many AI techniques out there, but since we need a "brain" to control the vehicle, neural networks would do the job. Neural networks are based on how our brain works; they seems to be the right choice. We will need to define what the input and output should be for this neural network.
Neural Networks
The Neural Network Artificial Intelligence comes from how brains work. Our brain is composed of 1011 neuron cells that send electrical signal to each other. Each neuron is composed of one or two axon which work as output and many dendrites which work as input of electrical signals. Neurons need a certain strength of signal input that adds up from all the dendrites to be triggered. Once triggered, the neuron will fire and send an electrical signal down its axon to other neurons. Connections (axon and dendrites) will strengthen if they are often used.
This principle is applied to neural networks on a smaller scale. Today's computers don't have the power of computing that 20 billion neurons do, but even with a few neurons, we are able to have intelligent response from a neural network.
Neurons are organized in layers as figure 1 shows. The input layer will have entries, and depending on the strength of connection to each neuron in the next layer, the input signal is sent to the next layer. The strength of the connection is called a weight. The value of each neuron in each layer will depend on the weight of the connection and the values of the neurons of the previous layer.
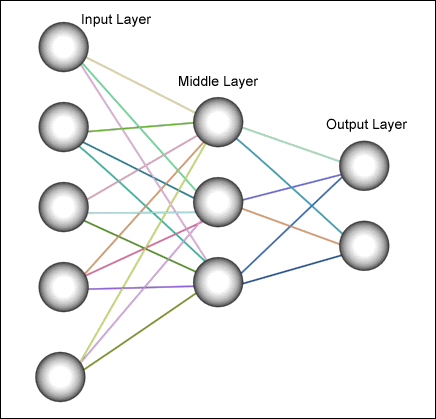
Figure 1: Basic Neural Network
A driver could be compared to a "function". There are different inputs: what the driver sees. This data is processed by the brain as a function and the response of the driver is the output of the function.
A function f(x) = y transforms a value x (one dimension) into y (one dimension).
We use a back propagation neural network for the "brain" of the driver because such a neural network is capable of approximating any function with a domain and a range that each have multiple dimensions: f(x1,x2,
,xn) = y1,y2,
,ym
That is exactly what we need here since we need multiple inputs and multiple outputs.
When a neural network has just a couple of neurons, we can compute what the weight should be to get the desired response. But as we increase the number of neurons we use, we also increase the complexity of computing what the weight should be. A back propagation network lets us train the neural network which sets the weights for us. We just need to provide the desired outputs with the corresponding inputs.
After being trained, the neural network will respond close to the desired output when a known input is given and will "guess" a response for any input that doesn't exactly match the trained input-output.
The actual equations are out of the scope of this article. There are plenty of good books that explain how neural networks with back propagation works.
The neural network used in this case has 4 layers (Figure 2). I tried many different combinations, from 3 layers to 6 layers. It worked OK with 3 layers but when I trained it with at set of 22 inputs-outputs, the approximation of the function wasn't accurate enough. 5 and 6 layers work fine, but training it took a while (up to 20 or 30 minutes on a PII) and when I ran the program it took a lot of computation time from the CPU.
My input layer has 3 neurons, and the output layer has 2. I'll explain why later. The 2 layers in between have 8 neurons each. Again, I tried layers with more neurons and less neurons and settled for 8 since it was doing an appropriate job.
When choosing the number of neurons, keep in mind that each layer and each neuron you add to the system will add computation time to calculate the weights.
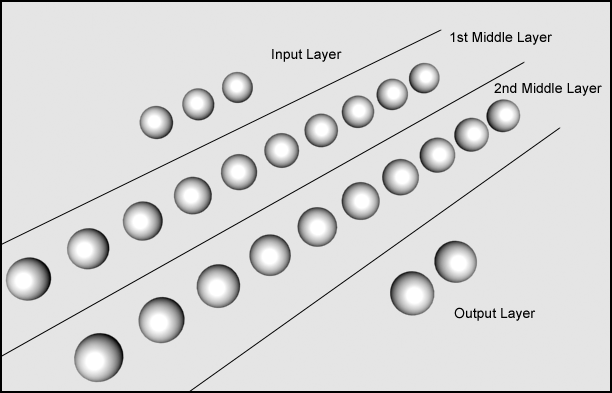
Figure 2: 3-8-8-2 Neural Network
Adding Neurons:
We have the input layer I with i neurons, and output layer O with o neurons. We want to add one neuron to the middle layer M. The number of connections between neurons that we add is (i+o).
Adding Layers:
We have the input layer I with i neurons, and output layer O with o neurons. We want to a layer M with m neurons. The number of connections between neurons that we add is (m x (i+o)).
Now that we have covered how the "brain" works, we need to understand how to define the inputs and outputs of the neural network. The neural network by itself doesn't do anything if we don't give it the information from the virtual world and plug the neural network's response back in to control the vehicle.

The input
|
