OpenGL Object Hierarchy

This is a simple example of object hierarchy. We can think of object hierarchy as a mode of representing a complex object composed of more simple ones related to each other. In this tutorial we'll learn two new GL commands: glPushMatrix() and glPopMatrix() to accomplish our goal, which is modeling a simple robot.
The robot structure
 |
 |
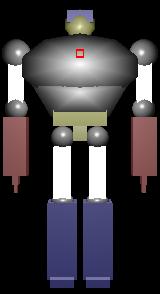 |
| Fig. 1a - Object Hierarchy | 1b - GL model | 1c - GL light model |
Note the relationships between objects: Leg is pelvis child and pelvis is bust's child, forearm is arm's child and arm is shoulder's child, shoulder is bust's child too, and so on. So, if we move bust for example, legs and arms move too. This is an object hierarchy.
Every piece of the robot is modeled into a function and stored in a display list so we'll have:
void struct_part_name(void) { glNewList(part_name,GL_COMPILE); .../* GL Commands to model */ glEndList(); }
So, for example here is the code for left arm:
void struct_left_arm(void) { glNewList(left_arm,GL_COMPILE); // Shoulder glTranslatef(1.1,0.25,0.0); glScalef(0.5,0.5,0.5); glColor3ub(128,128,128); glutSolidSphere(0.5,20,20); // Arm glTranslatef(0.0,-1.10,0.0); glScalef(0.5,1.5,0.5); glColor3ub(255,255,255); glutSolidCube(1.0); glEndList(); }
Note that in this example I'll use some GLUT commands to draw Spheres and Cubes so remember to link gl/glut.h in the headers section as indicated below
... #include <gl/glut.h> ...
The most important function is DrawRobot() that draws all the parts of the robot and which uses the OpenGL commands glPushMatrix() and glPopMatrix() to estabilish the relationships between objects.
Pseudocode
void DrawRobot() { glPushMatrix(); /* all objects are bust's son that is if we move bust all other parts move too */ /*-------------------- DRAW HEAD AND BUST -----------------------*/ glPushMatrix(); /* Draw head */ /* Draw bust */ glPopMatrix();/*---------------- DRAW RIGHT ARM AND FOREARM --------------*/ glPushMatrix(); glPushMatrix(); /* Draw Right arm */ glPopMatrix(); glPushMatrix(); /* forearm is arm's child */ /* Draw Forearm */ glPopMatrix(); glPopMatrix();/*-------------- DRAW LEFT ARM AND FOREARM -----------------*/ glPushMatrix(); glPushMatrix(); /* Draw Left arm */ glPopMatrix(); glPushMatrix(); /* forearm is arm's child */ /* Draw Forearm */ glPopMatrix(); glPopMatrix();/*------------------ DRAW PELVIS AND LEGS ----------------*/ glPushMatrix(); /* another glPushMatrix because if we move pelvis the legs move too... (legs are pelvis' son) */ glPushMatrix(); /* Draw pelvis */ glPopMatrix(); glPushMatrix(); glPushMatrix(); /* Draw Right thigh */ glPopMatrix(); glPushMatrix(); /* leg is thigh's child */ /* Draw Leg */ glPopMatrix(); glPopMatrix(); glPushMatrix(); glPushMatrix(); /* Draw Left thigh */ glPopMatrix(); glPushMatrix(); /* leg is thigh's child */ /* Draw Leg */ glPopMatrix(); glPopMatrix(); glPopMatrix(); glPopMatrix(); }


The Code
void DrawRobot(void)
{
/*-------------BUST AND HEAD--------------*/
glPushMatrix();
glRotatef(bust_angle_y,0,1,0);
glRotatef(bust_angle_x,1,0,0);
glPushMatrix();
glCallList(bust);
glCallList(head);
glPopMatrix();
/*--------RIGHT ARM AND FOREARM---------*/
glPushMatrix();
glTranslatef(0,0.25,0);
glRotatef(right_arm_angle,1,0,0);
glTranslatef(0,-0.25,0);
glPushMatrix();
glCallList(right_arm);
glPopMatrix();
glPushMatrix();
glTranslatef(1.25,-0.7,0);
glRotatef(right_forearm_angle,1,0,0);
glTranslatef(-1.25,0.7,0);
glCallList(right_forearm);
glPopMatrix();
glPopMatrix();
/*---------LEFT ARM AND FOREARM---------*/
glPushMatrix();
glTranslatef(0,0.25,0);
glRotatef(left_arm_angle,1,0,0);
glTranslatef(0,-0.25,0);
glPushMatrix();
glCallList(left_arm);
glPopMatrix();
glPushMatrix();
glTranslatef(1.25,-0.7,0);
glRotatef(left_forearm_angle,1,0,0);
glTranslatef(-1.25,0.7,0);
glCallList(left_forearm);
glPopMatrix();
glPopMatrix();
and so on...
In the main function I added some keys to control the robot. They are:
'1' & 'Q'
'2' & 'W'
'3' & 'E'
'4' & 'R'
'5' & 'T'
'6' & 'Y'
'7' & 'U'
'8' & 'I'
KEY ARROWS
PGUP & PGDOWN
'V' 'B' 'N' 'M'right arm control
right forearm control
left arm control
left forearm control
left thigh control
left leg control
right thigh control
right thigh control
rotate model
light control
camera control
And finally here the bin & source.
Happy coding...
Arturo "IRIX" Montieri : montieri@hotmail.com
Discuss this article in the forums
Date this article was posted to GameDev.net: 12/28/2000
(Note that this date does not necessarily correspond to the date the article was written)
See Also:
General
© 1999-2011 Gamedev.net. All rights reserved. Terms of Use Privacy Policy
Comments? Questions? Feedback? Click here!